Project Update
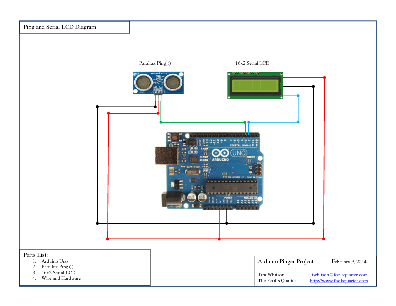
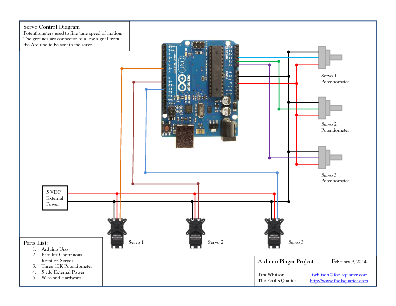
I set the whole thing up. Spent a day wiring a board to test my entire setup. Turns out I was asking too much of the micro-controller. One of the three servos would not respond correctly. I read somewhere it eats a lot of memory whenever you update a LCD display. I stripped the code for the LCD figuring it was asking too much of the UNO. The third servo still didn't rotate correctly. One of the other things I was asking the UNO to look at on each cycle was the position of three potentiometers. This turned out to be the problem. I used a different means to set the speed and rotation of the servos. Now all three servos responded correctly. I added back in the code for the LCD and it worked great too. Now I just have three empty holes where the pots were, but I can live with that. I'll update the code and the diagrams in a day or two.