The Clown - 2009
A good friend of mine, and technically my brother-in-law, runs a haunted house in Hubbard, Oregon. It's a lot of fun see the thing go from an idea to a working haunted house. I get ask to help on the sound files and technical issues. As time went by I decided to build something automated for it. The clown you see above is my second attempt to fully automate a prop. The first year it had a different costume, a bit gruesome since we put it along the trail for the kids to go through. So in a sadistic sort of way I decided to use a clown in 2009. For some reason kids are afraid of clowns, gotta feed on that.
One of the challenges I had to overcome was not to use pneumatics. Air cylinders would have made it a lot easier, but unless you invest in high quality equipment, it breaks down. You see this in haunted houses all the time. The prop wears out and breaks down toward the end of the season. Air also makes too much noise when it actuates, you can pipe the vent somewhere else, but there is still noise. I decided to go electric, 12 volt DC for reversability. Two motors, one for the raise / lower, one for the tilt.
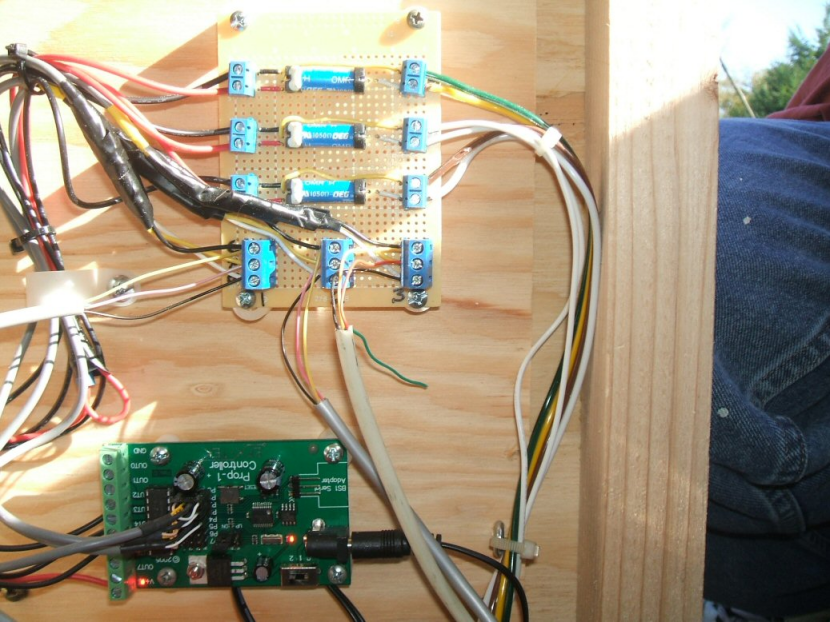
In 2008 the prop was controlled by a person pressing three switches. The three switches were: (1) Sound file, (2) Sound file and prop motion, (3) Sound file. In 2009 I was given the task to make it completely automated, no people. So after many weeks of unsuccessful attempts to get the PIR (Passive Infra-Red) detectors to work with various circuits, I found the Prop-1 controllers from EFX-TEX. These guys are great, they sell a great product line and their online forums will help you develop a program for the Prop-1. This controller is programmed for many uses through a simple Basic Stamp 1 microprocessor. It can be updated in the field with a laptop and USB adapter.
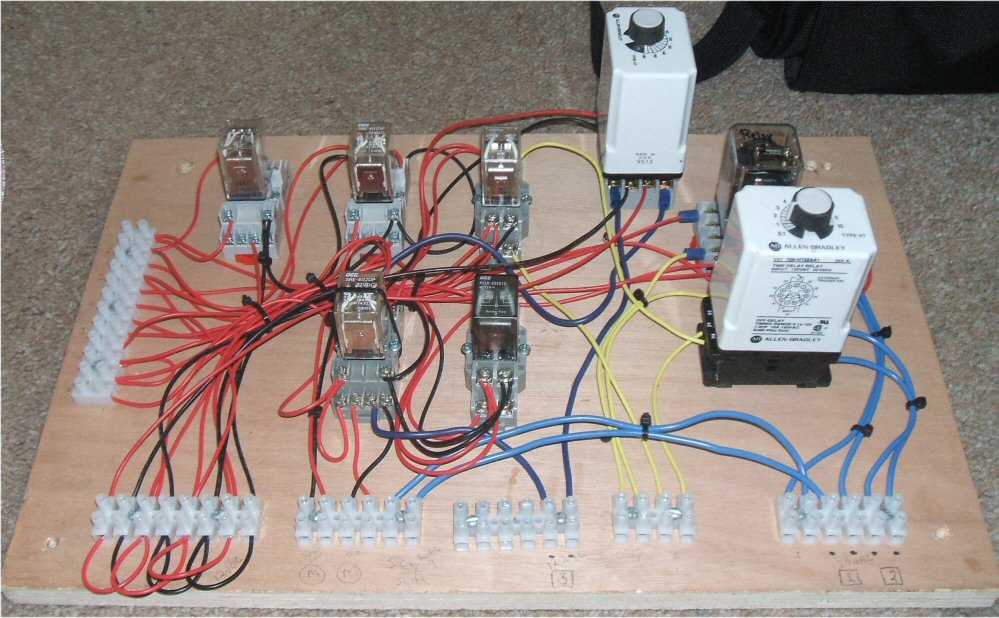
I used motor controller theory I learned in the Navy to design the relay board. When a relay is energized it powers itself until a limit switch is open disrupting power to the relay. The relay system I developed is very complicated, eight relays and nine limit switches. Initially I set it up this way because I did not realize something as great as the Prop-1 controller was available. I plan on replacing the relay board and the majority of the limit switches in 2010 with a second Prop-1 controller. I will use travel times to determine how long for the motor to run, with limit switches to kill power if they travel too far. The first Prop-1 controller will still run the PIRs and send the start signal to the second Prop-1. Two limitiation of this controller is limited input / output connections and program space on the chip. But they are only $40 each and by splitting the two functions up I will have more than enough connections and also have cleaner code in the microprocessors.